
ResNet
2023年10月8日大约 3 分钟
ResNet
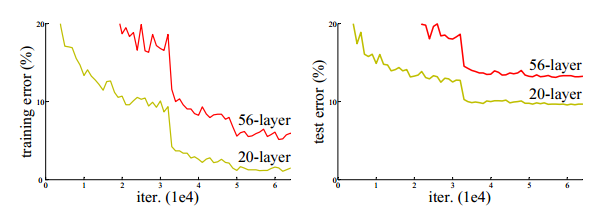
深度卷积神经网络在图像分类方面取得了一系列突破。深度网络以端到端的多层方式自然地集成低/中/高级特征和分类器,并且特征的“级别”可以通过堆叠层的数量(深度)来丰富。最近的证据表明网络深度是至关重要的,在具有挑战性的ImageNet数据集上的领先结果都利用了“非常深”模型,深度为16到30。但当深度越高时候却会产生退化问题(不同于过拟合,证明如下图),ResNet则可以解决这个问题。
优点
1.残差连接:ResNet引入了残差连接,通过将输入直接添加到网络的输出,构建了一个跳跃连接(skip connection),用于传递梯度和信息。这使得网络可以学习残差映射,即学习输入与输出之间的差异。这种连接方式有助于减轻梯度消失问题,让深层网络能够更容易地学习和优化。
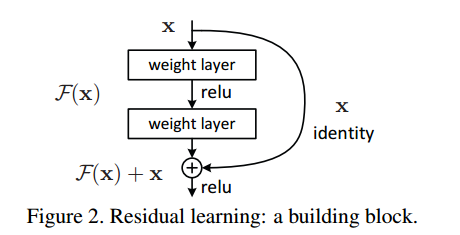
2.残差模块:ResNet的基本构建块是残差模块,每个模块由两个或三个卷积层组成。残差模块通过残差连接实现了跨层的信息传递,使得网络可以学习更复杂的特征表示。这种模块化的结构使得网络的训练更加容易,同时也减少了参数量。
3.预训练和迁移学习:由于ResNet在大规模图像分类任务(如ImageNet)上取得了出色的性能,预训练的ResNet模型可以作为通用的图像特征提取器,并用于其他计算机视觉任务。这种预训练和迁移学习的优势使得ResNet成为了许多领域的研究和实际应用的首选模型。
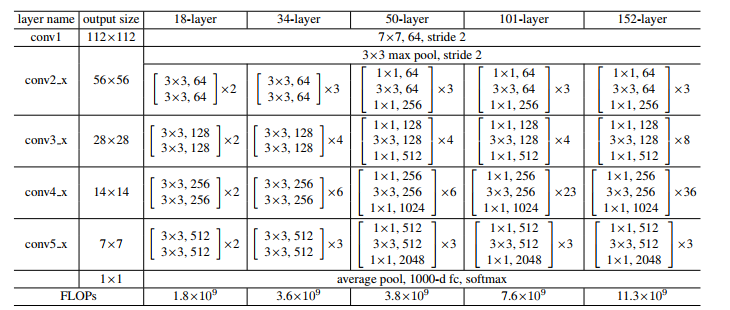
模型结构
代码
import torch
import torch.nn as nn
# 定义基本的残差块
class BasicBlock(nn.Module):
def __init__(self, in_channels, out_channels, stride=1):
super(BasicBlock, self).__init__()
self.conv1 = nn.Conv2d(in_channels, out_channels, kernel_size=3, stride=stride, padding=1, bias=False)
self.bn1 = nn.BatchNorm2d(out_channels)
self.relu = nn.ReLU(inplace=True)
self.conv2 = nn.Conv2d(out_channels, out_channels, kernel_size=3, stride=1, padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(out_channels)
self.shortcut = nn.Sequential()
if stride != 1 or in_channels != out_channels:
self.shortcut = nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(out_channels)
)
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out += self.shortcut(residual)
out = self.relu(out)
return out
# 定义ResNet模型
class ResNet(nn.Module):
def __init__(self, block, num_blocks, num_classes=10):
super(ResNet, self).__init__()
self.in_channels = 64
self.conv1 = nn.Conv2d(3, 64, kernel_size=3, stride=1, padding=1, bias=False)
self.bn1 = nn.BatchNorm2d(64)
self.relu = nn.ReLU(inplace=True)
self.layer1 = self.make_layer(block, 64, num_blocks[0], stride=1)
self.layer2 = self.make_layer(block, 128, num_blocks[1], stride=2)
self.layer3 = self.make_layer(block, 256, num_blocks[2], stride=2)
self.layer4 = self.make_layer(block, 512, num_blocks[3], stride=2)
self.avg_pool = nn.AdaptiveAvgPool2d((1, 1))
self.fc = nn.Linear(512, num_classes)
def make_layer(self, block, out_channels, num_blocks, stride):
layers = []
layers.append(block(self.in_channels, out_channels, stride))
self.in_channels = out_channels
for _ in range(1, num_blocks):
layers.append(block(out_channels, out_channels))
return nn.Sequential(*layers)
def forward(self, x):
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.layer1(out)
out = self.layer2(out)
out = self.layer3(out)
out = self.layer4(out)
out = self.avg_pool(out)
out = torch.flatten(out, 1)
out = self.fc(out)
return out
# 创建ResNet-18模型
def ResNet18(num_classes=10):
return ResNet(BasicBlock, [2, 2, 2, 2], num_classes)
# 创建ResNet-34模型
def ResNet34(num_classes=10):
return ResNet(BasicBlock, [3, 4, 6, 3], num_classes)def reorg_dog_data(data_dir, valid_ratio):
labels = d2l.read_csv_labels(os.path.join(data_dir, 'labels.csv'))
d2l.reorg_train_valid(data_dir, labels, valid_ratio)
d2l.reorg_test(data_dir)
batch_size = 32 if demo else 128
valid_ratio = 0.1
reorg_dog_data(data_dir, valid_ratio)